不思議な動きで物を優しくキャッチ。
INDEX
タコなどの軟体動物を思わせる触手を使い、物をつかむロボットを開発した、と米ハーバード大学の研究チームが発表しました。クラゲの細い触手をヒントに設計したロボットです。

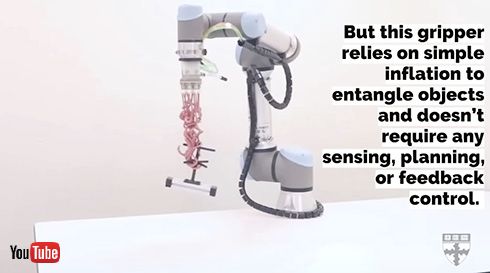
不規則な形状の物でも持ち上げられる(以下画像はYouTubeより)
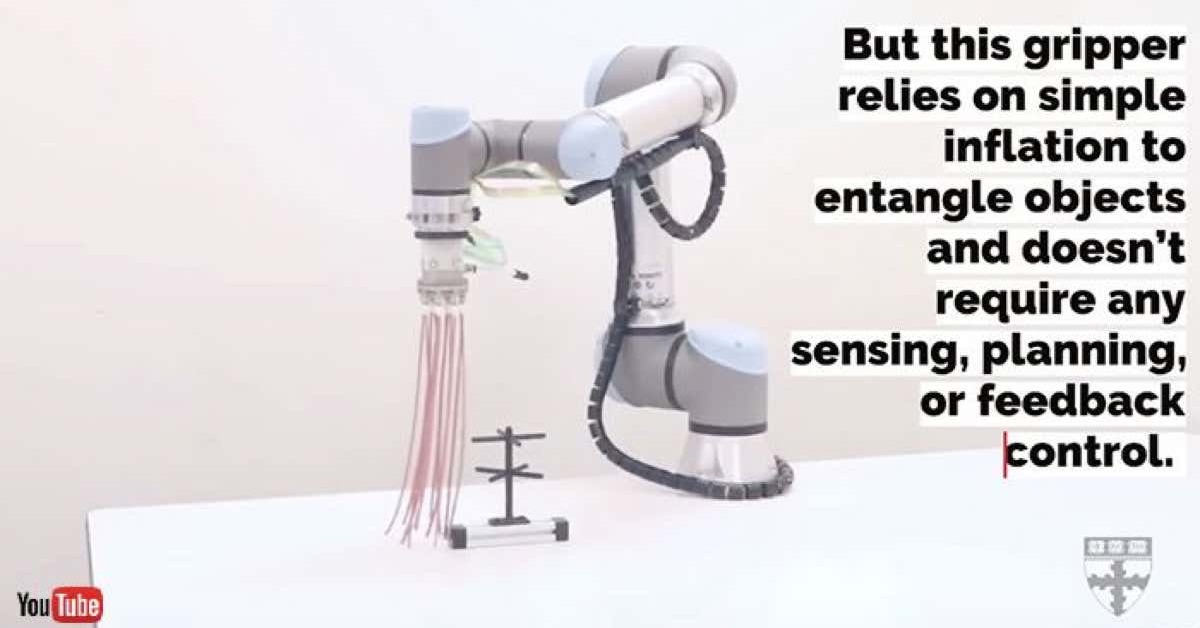
発表された「Tentacle robot(触手ロボット)」は、長い紐状のアームを使って物をつかみます。ゲームセンターに設置されたクレーンゲームのような動きで、物体を持ち上げます。アームからのびる触手がターゲットに絡みつく様子は、まるでタコが獲物を捕らえるようにも見えます。
触手はゴムチューブのように中が空洞で、加圧することで曲がりくねる仕組み。シンプルな動きで物体を包み込み、複雑なプログラムを必要としない設計です。
複雑な形のものを持ち上げられるかどうかを確認するため、実験では観葉植物やおもちゃなどをつかむ検証を実施しました。今後、柔らかい果物や野菜の流通、ガラス製品など複雑な形の物をつかみ上げることに応用できると期待されています。
なお、研究結果は米国科学アカデミー紀要(PNAS)に掲載されました。



