実際の競泳選手の身体形状を再現し、複雑な泳ぎの動作ができる「SWUMANOID(スワマノイド)」を東工大が開発した。
INDEX
東京工業大学 中島研究室のグループは、スイマーの泳ぎを忠実に再現できる水泳ヒューマノイドロボ ット「SWUMANOID(スワマノイド)」を開発しました。将来的に、より速く泳げる動作を解明したり、高速水着の開発などへの応用が期待されます。
水泳の研究で問題になるのが、例えば手で水を掻いている時に、手がどれくらい推進力を生み出しているのかというのを知るというのが難しいということです。実際のスイマーを使って測ろうとする研究もありますが、実際のスイマーだとスイマーの手にいろいろなセンサーを付けたりするのが難しいですし、全く同じ動きを何回も繰り返すということも、実際の人間だとできません。
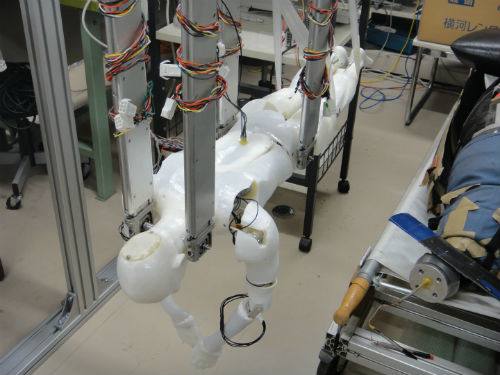
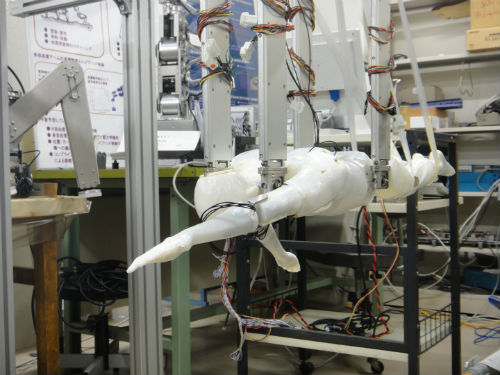
SWUMANOIDは、実際の競泳選手の身体形状を三次元ボディスキャナで測定し、忠実に 1/2スケールで再現されています。また、防水処理した 20個のモータをコンピュータ制御することにより、スイマーの複雑な泳ぎの動作を作り出しています。
スイマーの動きというのは、肩が結構大きく動くんです。そういう大きな動きというのが、普通のヒューマノイドロボットではあまり想定されてなくて、そういうクロールのような大きな動きを実現するために、肩の部分に特別な関節を余計に設けています。
ロボット全体は4本の支柱を介して専用の駆動装置に取り付けられ、ロボットが水から受ける力を測定できます。現在は試作段階のため、泳ぎの速さは実際のスイマーのサイズに換算して秒速 0.64m(156秒/100m)と遅いですが、今後、更に改良して高速化を図る予定です。
バタフライと背泳ぎはすぐにでもできる状態です。平泳ぎは足の動かし方が違うので、今の足だとできないので、平泳ぎもできる足も開発中です。
やはり今だと指示されている状態で、泳いでないじゃないかということもありますので、実際に泳がすということですと、自由遊泳をさせたいと考えています。そうすると、ヒューマノイドロボットが今歩いたり走ったりできるわけですが、そこから更に本当の意味で泳ぐロボットができると、例えばスポーツの研究だけではなく、水難救助など水中で泳げるロボットならではの用途が見えてくると思います。