それは、上質なミステリーを解くような名推理だった。「ROVちゃんかわいい」→実は男子だった!?【画像・資料71枚】
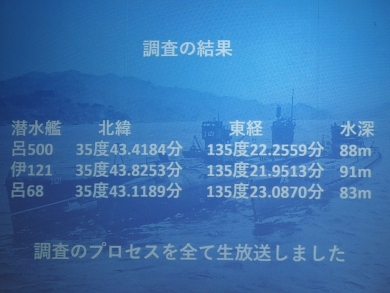
2018年6月、ラ・プロンジェ深海工学会が若狭湾で呂号五百潜水艦(愛称:ろーちゃん 以下、呂500)を発見しました(関連記事)。その4日間にわたる探査をギュギュっとまとめて紹介する報告会が8月5日に記念館「三笠」艦内講堂にて開催されました。


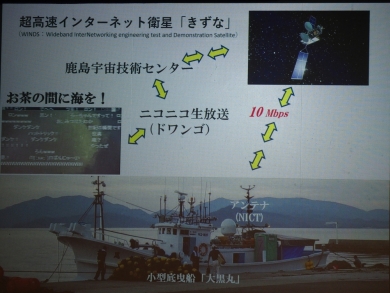
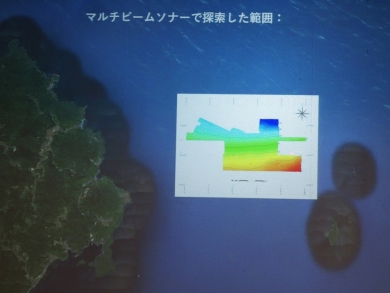
この報告会では、ラ・プロンジェ深海工学会代表理事で探査プロジェクトの指揮を取った浦環(うら たまき)氏による呂500探査作業の報告に加えて、呂500の撮影に活躍したROV(Remotely operated vehicle)「SeaROVER」、海底地形の調査と沈没艦影の発見に大きく貢献したマルチビームソナーについて、それぞれ協力メーカーによる解説もありました。
まず浦氏は、五島列島沖に終戦後海没処分された潜水艦24隻の探査を実施し、8隻の艦名を特定した2017年の五島列島沖海没潜水艦探査(関連記事)と比べて、今回の探査対象は3隻と少なかったにも関わらず「はるかに困難だった」と振り返りました。五島列島沖探査は全ての探査対象で海没位置に関する正確なデータがありましたが、今回の探査では呂500の沈没位置が全く不明だったからです。
あらためて今回の調査の詳細を振り返ります。探査対象海域は次の4カ所を候補としていました。
- (1)米海軍資料にある海没位置
- (2)福井県水産試験所がサイドスキャンソナーで探索した結果、海底に70メートルの物体が確認された位置「福井水試」
- (3)地元の漁師さんたちが潜水艦が沈んていると言い伝えていた「浦島礁」
- (4)深田サルベージが40年前に実施した探査で確認した「伊121」「呂68」の海没推定位置

この候補海域から浦氏が最も重視したのが深田サルベージによる探査データでした。探査実況における浦氏の説明によると、このデータを入手した経緯は全くの偶然だったそうです。五島列島沖潜水艦探査報告会を佐世保で開いたとき、次の探査予定が若狭湾の呂500探査であることを浦氏が紹介すると、偶然来場していた深田サルベージの社長が1974年に若狭湾で実施した伊121と呂68の探査データを提供してくれたとのことでした。
当時の海底探査はシングルビームソナーを使い、船の位置もGPSではなく船から見える陸の目標(山頂や灯台、灯標など)を方位コンパスで測位する地文航法、もしくは「ロランC」といった電波航法(複数の無線測位局から送信した電波を受信できた時間差を利用して船の位置を求める方法。誤差は30〜300メートル。日本では2015年に運用停止されている)で測位しているので精度が低かった可能性もあります。
それでも浦氏は深田サルベージの探査データを優先して探査を開始します。対して、海没処分実施日が5月6日と、日本側文献資料の4月30日と異なる米軍資料については信頼性が低いと探査前から判断していました。
伊121の海没位置を的中した「名推理」
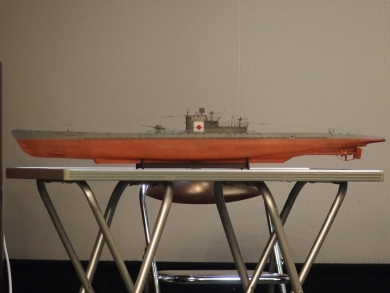
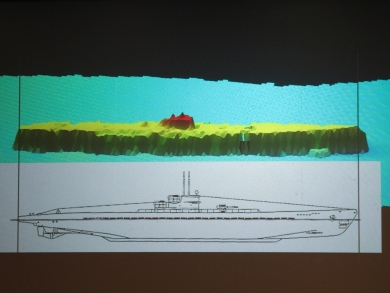
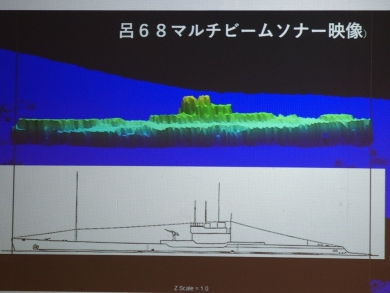
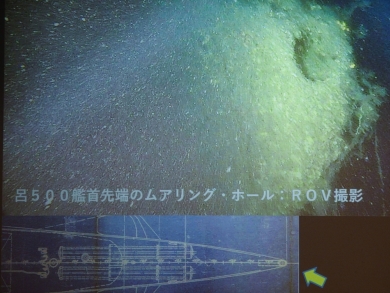
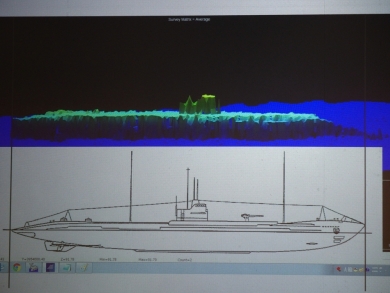
以上の状況を踏まえて、探査初日の6月18日に福井水試のエリアにあるのが潜水艦ではないことを確認した後、2日目の同19日に深田サルベージが「呂68」を発見した位置から真北にズレた海底と、「伊121」発見位置の北東すぐ近くに潜水艦の艦影を発見。ソナー映像と艦型図による全長と艦橋の位置、艦尾形状の照合から、前者を呂68、後者を「呂500」と推定し、3日目の20日にROVを投入して撮影した画像から目的の呂500を特定しました。決め手となったのは、呂500の前身であるUボートIXC型特有の形状である「艦首の真ん中に空いた穴(=ムアリングホール)」でした。

しかし、これまで伊121があると思われていた場所で呂500を発見したことで、今度は伊121の海没位置が不明になります。
このときに大きく貢献したのが、Twitterを通して探査を応援していたacj@yumemi_ai氏が提供した「海没処分のためにえい航されている三隻の潜水艦」の写真でした。
この写真は、中央にえい航船とつながっている伊121、そして、呂500と呂68が伊121の左舷右舷に横抱きされていました。この様子から浦氏は、「ほぼ直航しつつ左右の呂68、呂500の順番で沈めて、最後に伊121を沈めるのが妥当」と推測します。
この推測が見事的中。こうして探査最終日の6月21日に呂68、呂500を結んだ北西延長線上に伊121の姿をROVで確認しました。


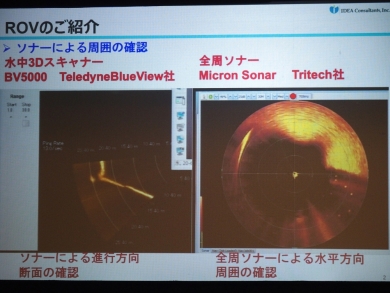
ROVで協力した「いであ」の高島創太郎氏からは、呂500探査で使用したROV「SeaROVER」のソナーやカメラの解説がありました(SeaROVERの仕様については、「浦環教授に聞く、若狭湾に眠る旧日本海軍のUボート「呂500」を探す理由」をご覧ください)。
今回の探査では、SeaROVERに水中三次元スキャナー「BV5000」と高解像度水中カメラ「SS465」を搭載して、海底に沈む潜水艦の姿を立体画像データとして記録しました。BV5000は走査周波数1.35MHzで進行方向の縦横回転機能で海中をスキャンします。