
顔のディスプレイは「オーバーウォッチ」の「スノーボール」を参考にしたそうです。
6本の足を力強く動かしながら、ディスプレイ上の目玉をキョロキョロ――そんな手製の6脚歩行ロボが、「かっこよくてかわいい」「癒やされる」と注目を集めています。



クリエイターのshinji watanabe(@JohnneyF)さんが製作中のロボット。未完成ながら、人の手に追従して視線を動かしたり、顔にバッテリー残量を表示したりまばたきしたりと、楽しいギミックを見せています。







編集部が取材したところ、製作を開始したのは2017年の6月ごろ。Kickstarterで見た6脚歩行ロボ「HEXA」に触発され、自分で作れないか調べたのがきっかけだそうです。そして、ラジコンロボット「PhantomX」(関連記事)をベースに、小型化と関節を加えるようアレンジするところから始めたといいます。
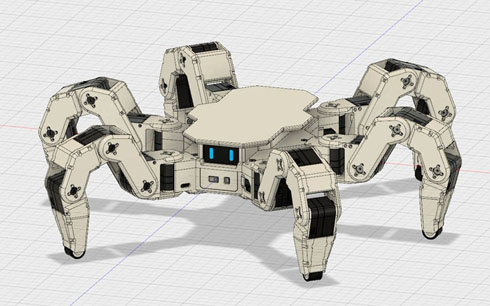
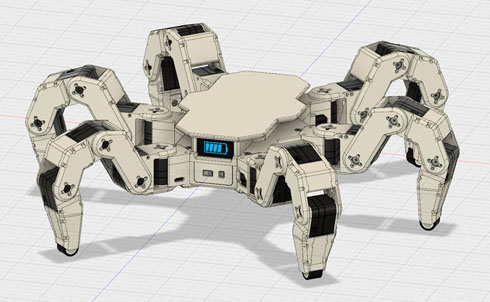
サーボモーターや電子部品、ネジ以外は全て自作。ボディーは3D CADツール「Fusion360」で設計し、3Dプリンタで出力しています。制御にはPhantomXに用いられているオープンソースのプログラム、「PhoenixCode」をカスタムして使用しているそうです。
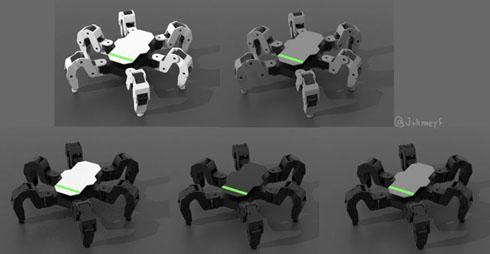
2017年11月時点の設計案
2018年3月にできた脚部の試作品
4月にはボディーのパーツが出来上がり……
仮組みをして、かなり形になってきた
ボディーのデザインに際してアニメのロボットなどは特に参考にしておらず、PhantomXのバージョン2を踏襲しつつ、シルエットがすっきり見えるようソリッドな形状に。顔のディスプレイの挙動は、ゲーム「オーバーウォッチ」に登場する「スノーボール」を研究して設定しているそうです。
2月に投稿されたデザイン
ツイートに寄せられた「タチコマさんみたいにしゃべるのでしょうか?」との質問については、「音声ホームアシスタントの技術を使えばできるかもしれませんが、しゃべらせることについては特に考えていません」とwatanabeさん。人語をしゃべるよりも、「ピポッ、キュゥーン」など、電子音を発するロボットをイメージしているとのことです。
とはいえ「呼んだら寄ってきてくれたらいいなあ」と、コミュニケーション機能は検討している様子。実現するには周囲環境を把握するセンサーや処理用のコンピュータが必要なのですが、現状ではボディーに仕込めず、勉強中とのことです。watanabeさんがどのような完成形を見せてくれるのか楽しみ。
画像提供:shinji watanabe(@JohnneyF)さん
(沓澤真二)
