毎年大勢の人が訪れる「東京大学駒場リサーチキャンパス公開」。今年もさまざまな最先端研究の見学・紹介や、実験・実習に参加できるワークショップなどが行われた。
その中で目を引いたのが、生産技術研究所の「人の行動を模倣するロボット」。お絵描きロボットから始まった研究は、踊りを踊ったり、ひもを結ぶロボットなどを経て、現在は「人の動作を捉えてそれをなぞった動きをするロボット」が開発中だ。
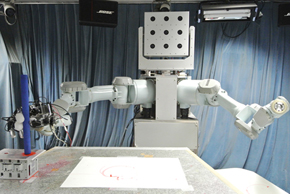
左がそのロボット。右の人が体を動かすとその通りに動く
そもそもの研究テーマは、人間が無意識に行っている行動を分解して機械(ロボット)の動作に反映させるというもので、開発初号機の「対象物を映像で捉えて、絵を描く」というロボットは、視覚情報を解析し、輪郭を描くプロセスを再現する(その際に、絵筆の動かしやすさを考慮して、上から下まで線を描いたら筆を上げて、残りの線を再び上から下へと描いてゆくという人間が絵を描くのと同じ動作を行う)というものだった。続いて開発された「踊りを踊るロボット」は、人間と異なる関節、機構を持っているロボットが自然に踊れているように見えるにはどうしたら良いか、と言うことを研究し、要所要所の決めポイントでポーズをとるようにし、途中の動作を機械が再現できるように省いて(成立するように調整して)しまう事でそれを実現した。
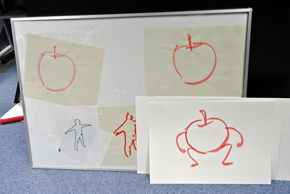
開発初号期の「対象物を映像で捉えて、絵を描くロボット」
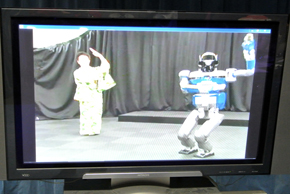

続いて開発された「踊りを踊るロボット」
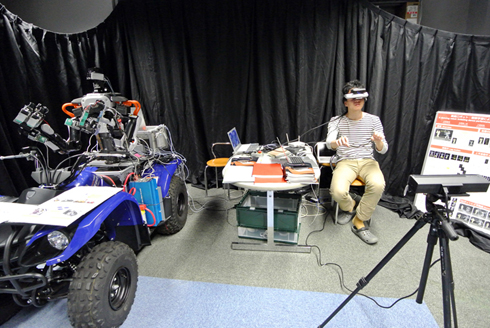
それらの研究を踏まえ、今回展示されたのが、「人間がとった動作をトレースしてロボットの動きに反映させる」というもの。操縦者の動作をロボットに反映させると言うと、Gガンダムの操縦系統や、最近ではパシフィック・リムの操縦方法などが思い浮かぶが、まさにそれに近いことが実現されていたのだ。
操縦者の動作を「Kinect2」で捉え、動作を解析。それを無線LANでロボットに転送しサーボモーターを動かして動作を再現するという仕組み。
人間の動きを完全に再現(トレース)しようとすると、人間とロボットの関節やフレーム(手足の部分)の長さ、大きさの差異や、可動域の違い、操縦者が変わったときの身長差や個人差などをそれぞれ調整しなくてはならないため、非常に手間がかかってしまう。そのためこの研究では、人間の動きを解析したのち「ロボットがその動きの結果を得るためにどのように各部位を動かせば良いか」という命令に変換、実際に動作を行うという処理が短時間の間に行われている。決まりきった(プログラムされた)動きを再現するだけならもっと早い反応速度が得られるが、不特定な動きを捉えてそれをその都度ロボットに反映させるために、現時点ではわずかなタイムラグが生じてしまっているという。
これらのロボットの応用、活用想定としては、例えば災害現場などで人が入れない場所に作業車両などを入れて作業したいという場合に、このロボットを操縦席に乗せて遠隔操作する――といったケースが考えられるという。専用のラジコンや救助ロボットなどをゼロから開発しなくても、これなら既存の作業車両に人間型ロボットを乗せるだけで遠隔操作ができるようになるため、急なニーズにも素早く対応できるようになるという。
今回の展示では遠隔操作を想定していたようだが、漢と書いてオトコと読む我々としては、ロボに乗り込んで「エルボーロケットォォォォォ〜〜〜!!!」と叫びたい。
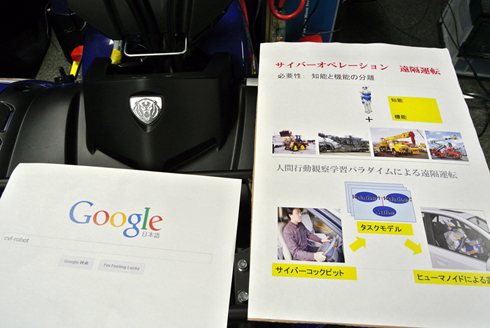
災害現場などでの応用例
コメントランキング
「回転寿司」でコスパ最強だと思うチェーンは?【アンケート実施中】(投票結果) | グルメ ねとらぼ
「戦国武将」で最強だと思うのは誰?【アンケート実施中】(投票結果) | ライフスタイル ねとらぼ
「最強」だと思う松田聖子のシングル曲は?【2026年版・人気投票実施中】(投票結果) | 音楽 ねとらぼリサーチ
「これだけは外せない!」サイゼリヤの定番メニューはどれ?【アンケート実施中】(投票結果) | グルメ ねとらぼ
NHK「朝ドラ」であなたが一番好きな作品は?【アンケート実施中】(投票結果) | ドラマ ねとらぼ