大阪大学大学院工学研究科の研究グループが四脚ロボットを開発し、猫の安定した歩行運動を生み出す反射回路の候補を発見。その成果をまとめた動画をYouTubeで公開しています。
研究グループは、動物の神経および筋肉の特性をコンピュータ上で再現して、歩く四脚ロボットを開発しました。
このロボットで歩行実験を繰り返した結果、「腰・膝伸筋間の相互興奮性回路」を発見。これは「膝関節を伸ばす筋肉が力を受けたときに腰関節を後ろへ伸ばし、腰関節を伸ばす筋肉が力を受けたときに膝関節を伸ばすような神経の回路」というシンプルな反射回路の構造であるとのことです。

しなやかな動きの謎に迫る
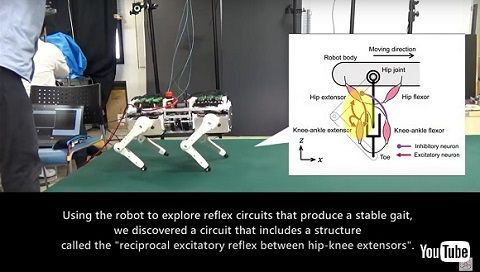
右図・黄色部分が「腰・膝伸筋間の相互興奮性回路」
この相互興奮性回路を刺激すると、猫と同様の「支持脚期延長現象」(脚が地面についたまま次の一歩が踏み出せなくなる現象)がみられたことから、猫の歩行をつかさどる重要な回路であると考えられます。
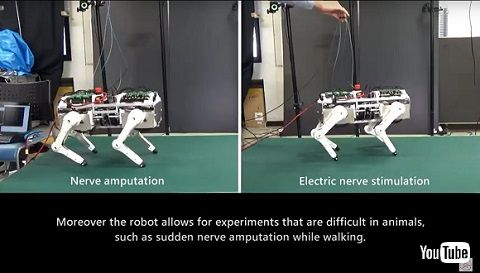
動物実験をせずに難しい実験が可能に!
とってもスムーズに歩くロボット
これらの開発と発見は、四脚動物が巧みに歩行する仕組みの解明と、動物のようにしなやかに動き回るロボットを実現する基盤技術の開発につながると期待されています。
(春夏冬つかさ)
コメントランキング
「東横イン、美味しすぎ」「朝食ならルートイン」 “食事がおいしい”と思う「ビジネスホテル」は?【アンケート実施中】(投票結果) | ライフスタイル ねとらぼ
「ルートインの大浴場 最高」「設備が充実のドーミーイン」 “お風呂が最高”だと思う「ビジネスホテル」は?【アンケート実施中】(投票結果) | ライフスタイル ねとらぼ
『名探偵プリキュア!』も絶好調! 「プリキュア」であなたが一番好きな作品は?【アンケート実施中】(投票結果) | アニメ ねとらぼ
ヤマト、CLANNAD、ヴァイオレット・エヴァーガーデン…… 令和に語り継ぎたい「昭和・平成の感動したアニメ」は?【アンケート実施中】 | アニメ ねとらぼ
「カップ麺としては別格なうまさ」「いつもお世話になってます」 あなたが好きな「カップラーメン」は?【アンケート実施中】(投票結果) | グルメ ねとらぼ