
球体で月面に着陸後、左右に変形拡張。走行しながら周囲の状況やわだちを撮影。
INDEX
タカラトミーは国立研究開発法人宇宙航空研究開発機構(JAXA)などとともに、直径約8センチ、約250グラムの超小型変形型月面ロボットを開発。「トランスフォーマー」や「ZOIDS(ゾイド)」といった玩具開発のアイデアが盛り込まれた探査ロボット「SORA-Q(ソラキュー)」が誕生しました。

月面探査ロボット「SORA-Q(ソラキュー)」、左奥が球体、右手前が変形拡張後

直径約8センチ、約250グラムと手のサイズ

ほぼ野球ボールと同じサイズ
「ソラキュー」の使命は、JAXAの「SLIM(スリム)プロジェクト」において月面の低重力環境下における超小型ロボットの探査技術を実証すること。小型月着陸実証機「スリム」から放出され、球体で月面に着陸すると、瞬時に左右に拡張。カメラを搭載した頭部が立ち上がり、スタビライザーを伸ばした状態へと変形し、外殻を車輪として回転させて走行しながら周囲の状況やわだちを撮影します。将来の月面における有人自動運転技術や走行技術の検討に向けて必要な月面データを取得してくることが目標です。
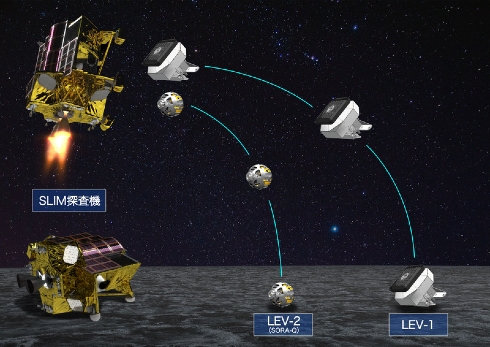
地球に画像を送るLEV-1とともに、「スリム」から放出される「ソラキュー」 (c)JAXA (c)TOMY

「ソラキュー」は撮影した画像をBluetooth通信でLEV-1に送信、LEV-1を経由して地球へ送ります (c)JAXA (c)TOMY

球体で着地する「ソラキュー」

着地するとすぐ、横に拡張

クロール走行

バタフライ走行
タカラトミーは2016年からJAXAとともに筐体(きょうたい)の共同研究をスタート。2019年にソニー、2021年に同志社大学が加わり4者での開発が進められていました。「ソラキュー」には組立式駆動玩具「ゾイド」シリーズや、二足歩行ヒューマノイド型ロボット「Omnibot 17μ i-SOBOT」、変形ロボット「トランスフォーマー」シリーズなど、玩具開発で培われた技術が生かされています。
SORA-Q 開発メンバー(一部)

玩具づくりの技術を生かして開発(イメージ)

「ゾイド」シリーズの「シールドライガー」 組み立て完了後に動き出す小型駆動のノウハウが「ソラキュー」に生かされました (c)JAXA (c)TOMY

「Omnibot 17μ i-SOBOT」(オムニボット ワンセブンミュー アイソボット) 高さ16.5センチ、体重350グラム。当時世界最小の二足歩行ヒューマノイド型ロボット (c)JAXA (c)TOMY

小型化とバランス感覚、さまざまな動作を可能とするノウハウが生かされました (c)JAXA (c)TOMY

ハリウッドで実写映画化された「トランスフォーマー」シリーズ ロボットモード (c)TOMY (c) 2022 Paramount Pictures Corporation. and/or TM & (c)TOMY. All Rights Reserved. TM & denote Japan Trademarks.

こちらはビークルモード。変形機構のノウハウがソラキューの開発に生かされました (c)TOMY (c) 2022 Paramount Pictures Corporation. and/or TM & (c)TOMY. All Rights Reserved. TM & denote Japan Trademarks.
拡張変形し、走る「ソラキュー」の動画がタカラトミーの公式ウェブサイトで公開中です。小さいけれど迫力ある動きを見てみませんか。

